
新智元报道
编辑:alan
由业内大佬 Amnon Shashua 创立的 Mentee Robotics,突然放出大招,将 AI 的能力嵌入到机器人的各个层面,实现了与世界的动态交互。
前段时间,由业内大佬 Amnon Shashua 创立的 Mentee Robotics,在憋了两年之后,突然放出大招!
这是一款名为 Menteebot 的人形机器人,将 AI 的能力嵌入到机器人的各个层面,实现了与世界的动态交互。

Menteebot 集成了尖端的 Sim2Real 学习(以获得逼真的步态和手部运动)、基于 NeRF 的实时 3D 映射和定位(用于复杂环境中的动态导航),以及大型语言模型(帮助认知世界和执行高级任务)。
Menteebot 实现了从口头命令,到复杂任务完成的完整端到端循环,包括导航、运动、场景理解、对象检测和定位、抓取以及自然语言理解。
比如在下面的例子中,Menteebot 的手臂和手呈现出全方位的运动和足够的准确性,可以执行递盘子这种精细的任务。
完美复刻人类的「灵巧手」:

先进的 Sim2Real 学习技术让 Menteebot 的动作非常敏捷,可以像人类一样朝任何方向行走、奔跑、原地转弯等。
来几个并步,扎个马步,都不在话下:
Menteebot 在搬运重物时会自动调整步态,如同人类一般。
——辛苦了小老弟,交给我吧:
此外,Menteebot 的名字还有另一个含义:
you can mentor(通过口头指示和视觉模仿即时学习新任务)。
它可以直接接受用户的语音指令,使用 LLM 来解释命令并「思考」完成任务所需的步骤。
然后,使用基于 NeRF 的算法,实时构建环境的认知 3D 地图,完成有关对象和项目的语义信息,并在地图中定位自身,同时规划动态路径以避开障碍物。
最后,它利用在 Sim2Real 中学到的知识,在路径上执行计划步骤,——简单来说,就是在模拟器中训练,在现实世界中实现。
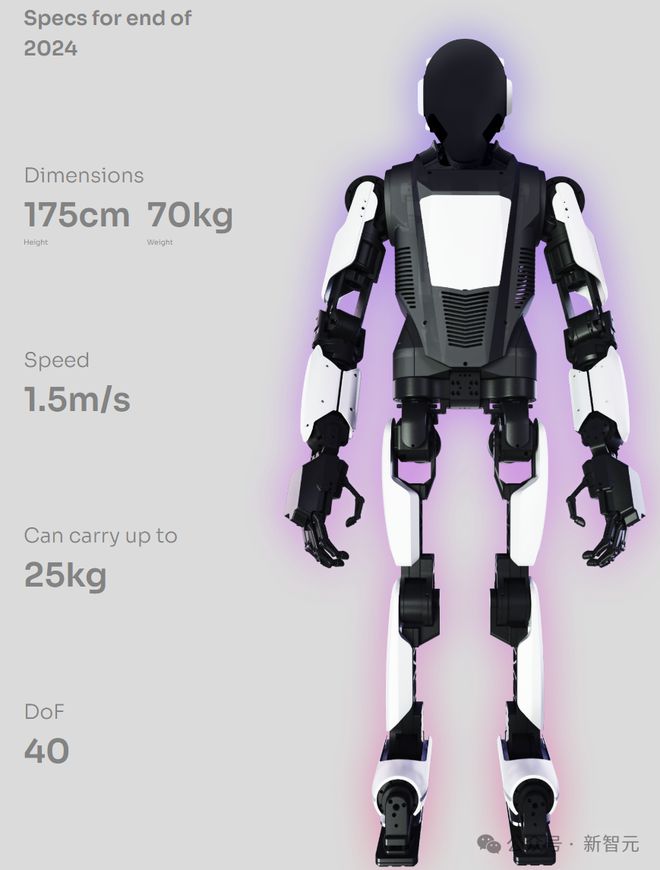
上图是 Menteebot 成品的效果图和各项参数,它将被设计为两种类型:
命比较好的机器人会成为家庭助理,负责餐桌布置、餐桌清理、衣物处理等家务工作;
而命不好的就会进厂打工,干一些重活。
尽管 Menteebot 目前仍处于原型阶段,但有大佬的背书,我们可以期待在不久之后见到更加惊艳的效果。

Amnon Shashua
Mentee Robotics 的创始人 Amnon Shashua,1993 年在麻省理工学院(MIT)获得大脑和认知科学博士学位,1996 年之后一直在耶路撒冷希伯来大学(The Hebrew University of Jerusalem)计算机科学系任教。
除了学术大佬之外,Amnon Shashua 还是多家著名科技公司的创始人:自动驾驶技术公司 Mobileye 的总裁兼首席执行官; 视觉设备公司 OrCam 的联合创始人; ONE ZERO 数字银行的创始人和所有者; 人工智能公司 AI21 Labs 的联创、董事长。

除 Shashua 之外,Mentee Robotics 的创始团队还包括前 Facebook AI 研究总监 Lior Wolf,和耶路撒冷希伯来大学教授、现任 Mobileye 首席技术官的 Shai Shalev-Shwartz。

到目前为止,团队已经筹集了 1700 万美元,由 Ahren Innovation Capital 领投。
也许,新的纪元已经开启,就如 Amnon Shashua 所言:
We are on the cusp of a convergence of computer vision, natural language understanding, strong and detailed simulators, and methodologies for transferring from simulation to the real world. 我们正处于将计算机视觉、自然语言理解、强大而详细的模拟器、以及从模拟转移到现实世界的方法相融合的风口浪尖。
LLM 开启机器人新纪元
最近几个月,越来越多的项目使用大语言模型,来创建以前似乎不可能的机器人应用程序。
在 LLM 的加持之下,机器人可以处理自然语言命令,并完成需要复杂推理的任务。
感知和推理
创建机器人系统的经典方法需要复杂的工程,来创建规划和推理模块。
另外,用户界面的设计也很困难,因为人们可以用不同的方式说出相同的指令。
——而 LLM,包括视觉语言模型(VLM)的出现,完美解决了这些问题。
朝这个方向迈出的第一步的是 Google Research 的 SayCan 项目。
SayCan 使用 LLM 的语义知识来帮助机器人进行推理,并确定哪些动作序列可以帮助完成任务。
论文地址:https://arxiv.org/pdf/2204.01691.pdf
在论文中,Google Research 与 Everyday Robots 合作开发了新的方法:利用先进的语言模型知识,使物理代理(如机器人)能够遵循高级文本指令,同时将 LLM 建立在特定现实世界环境可行的任务中。
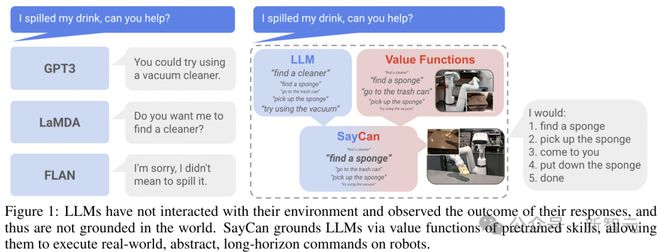
实验中,研究人员将机器人放置在真实的厨房,用自然语言发出指令。对于时间扩展的复杂和抽象任务,SayCan 可以给出高度可解释的结果。

人工智能和机器人研究科学家 Chris Paxton 表示,使用 LLM 和 VLM 使感知和推理更加容易,这让很多机器人任务看起来比以前更可行。
串联现有功能
经典机器人系统的一大局限性是需要明确的指令。
而 LLM 能够将松散定义的指令,映射到机器人技能范围内的特定任务序列。许多前沿模型甚至可以在不需要训练的情况下完成这些任务。
Paxton 表示,通过 LLM,机器人可以将不同的技能串在一起,并推理出如何使用这些技能。
像 GPT-4V 这样的新视觉语言模型,将在未来与机器人系统相结合,发挥广泛的应用。
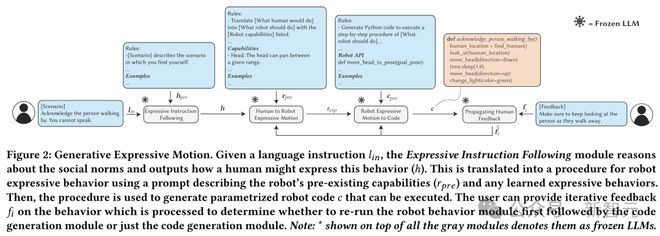
一个例子是 GenEM,由多伦多大学、Google DeepMind 和 Hoku Labs 联合开发。
GenEM 使用 GPT-4 对环境进行推理,并根据机器人的可负担性确定它应该从事什么样的行为。
论文地址:https://arxiv.org/pdf/2401.14673v2.pdf
它可以利用 LLM 训练数据中包含的大量知识以及上下文学习能力,并能够将操作映射到机器人的 API 调用。
例如,LLM 知道向人们点头致意是一个礼貌的行为,就可以操作机器人上下移动头部。
另一个项目是 OK-Robot,一个由 Meta 和纽约大学创建的系统:
论文地址:https://arxiv.org/pdf/2401.12202.pdf
它将 VLM 与运动规划和对象操作模块相结合,能够在机器人从未见过的环境中执行拾取和放下操作。
随着语言模型能力的不断增强,一些机器人初创公司抓住机遇,重新点燃了市场的希望。
比如,与 OpenAI 合作的 Figure:
不过话又说回来,大模型可以作为机器人的大脑,但真正办事的还得是身体,人形机器人这一套工程的门槛还是挺高的。
另外,对于当前的模型来说,数据可能是最重要的,完善机器人相关的数据集也是任重而道远。
专用基础模型
使用 LLM 的另一种方法是为机器人开发专门的基础模型。这些模型通常建立在预训练模型中包含的大量知识之上,并针对机器人操作定制架构。
在这方面最重要的项目之一是谷歌的 RT-2,这是一种视觉语言动作(VLA)模型,它将感知数据和语言指令作为输入,并直接将动作命令输出到机器人。
论文地址:https://robotics-transformer2.github.io/assets/rt2.pdf
Google DeepMind 最近又将版本升级到了 RT-X-2,可以适应不同类型的机器人形态,并且可以执行训练数据中未包含的任务。
DeepMind 与斯坦福大学合作开发的 RT-Sketch,可以将粗略的草图转化为机器人的行动计划。
论文地址:https://arxiv.org/pdf/2310.08864.pdf
Paxton 表示,这是另一个令人兴奋的方向,它基于端到端的学习,你只需拿一个摄像头,机器人就会弄清楚它需要做什么。
另外,机器人的基础模型也进入了商业领域。
今年 3 月,Covariant 宣布推出 RFM-1,这是一个 80 亿参数的模型,基于文本、图像、视频、机器人动作和一系列数值传感器读数进行训练。
Covariant 希望能够通过这样一个基础模型,解决不同类型机器人的许多任务。
在 Nvidia GTC 上宣布的 Project GR00T 也是一种通用基础模型,它使人形机器人能够将文本、语音、视频甚至现场演示作为输入,并对其进行处理以采取特定的一般操作。
当前,语言模型仍然有很多未开发的潜力,并将继续帮助机器人研究人员在基本问题上取得进展。
随着 LLM 的不断进步,我们可以期待更多的科幻场景一步步走进我们的生活。

参考资料:
https://x.com/AmnonShashua/status/1780611499133685889
https://venturebeat.com/ai/how-llms-are-ushering-in-a-new-era-of-robotics/






