作者 德新
编辑 王博

8 月底,地平线在北京开放了第一批面向媒体的高阶智驾方案 SuperDrive 体验。
预计到明年第三季度,SuperDrive 将伴随主机厂客户的第一款量产车交付。
目前在国内,仅有英伟达和华为两家的平台基础上,有车企向用户成功交付了带有城区功能的高阶智驾方案。地平线「J6P + SuperDrive」的组合,希望成为日益火热的高阶市场中有力的竞争者。
这次 SuperDrive 开放体验有两个背景:
- 第一是今年 4 月在北京车展前夕,地平线发布了征程 6 系列产品,J6P 是征程 6 系列最高阶的计算平台;
- 第二是据媒体报道,去年 10 月地平线内部针对智驾软件的研发做了战略调整。其将中阶的方案全部交由 Tier 1 合作伙伴来做,内部聚焦高阶,并且整合了原有内部中阶的团队。
从去年 10 月开始,地平线投入了超过 1000 人的团队,专门开发基于 J6P 软硬结合的高阶方案——SuperDrive。
招股书显示,截止 2023 年底,地平线约有雇员 2066 人,这意味着地平线将近一半的精锐部队都投到了 SuperDrive 的开发上。
招股书同时也披露,2023 年地平线的研发投入是 23.66 亿元。
地平线希望通过「饱和式」的投入,打造出一套高度产品化的智驾方案 SuperDrive,来拔高地平线整个商业生态的天花板。
如果 SuperDrive 大获成功,这也将大幅拔高国内智驾系统产品力的天花板。毕竟当前虽然中低阶的市场杀成红海,但真正能做高阶方案、开放的供应商仍然寥寥。
作为一套「初出茅庐」的高阶智驾系统,SuperDrive 在地平线的积累和投入之上,以及车辆目前在北京、上海闹市区所展示出的能力,可以说一出场就有「比肩第一梯队」的实力。
对于 SuperDrive 当前的进展,余凯在沟通会上评价:超过预期。
不少国内和国际车企客户,也在体验 SuperDrive 之后给出了颇高的评价。
一、按照 3A 游戏标准打造的智驾 HMI
过去很长一段时间,行业内都是将智能驾驶作为技术来开发,而 SuperDrive 立项的出发点就是「用产品思维做高阶智驾」,向车企和用户交付完整的高阶智驾产品体验。
我们可以先从智驾的 HMI,来管窥一下地平线在 SuperDrive 上的产品探索。
SuperDrive 的 SR,对物理世界进行了高度还原。
从界面上可以看到丰富的细节:

SR 界面与导航地图做了深度融合,它的底色是一层类似战争迷雾的效果,随着本车的行驶,呈现模拟探索认知的视角。
除了常见的车道、车辆目标之外,这套 SR 还会渲染道路两旁的树木以及天桥这样的建筑物。
由于采用的是无高精地图的方案,SuperDrive 使用了世界模型来做实时的感知识别,再叠加激光雷达点云,来还原树木以及一些大的建筑。这样做可以让用户更容易对齐真实世界和虚拟世界的坐标,增加安全感。
由于在测试中经常会遇到遛狗的行人,地平线把包括小猫、小狗在内的小目标,也做到了 SR 上。
针对常见重叠的目标,比如等待过路口的行人、路边停放的车辆也专门做了感知优化,SR 上被遮挡的目标仍能稳定追踪,物体结构清晰完整。
整个 SR,无论动静态的目标,尤其路边的行人、两轮车,包括朝向、姿态在内都非常稳定,很少有「跳变」。
这些都展示了扎实的算法和工程功底。

一位地平线工程师告诉我们:这套 SR,内部对于审美和产品细节有很高的标准。
首先,从元素展示上,作为深度研发智驾系统的供应商,他们最了解哪些信息对于用户理解智驾系统的行为、建立安全感是必要的。
过去,一些智驾系统的 HMI 开发由车企与供应商分开主导,智驾供应商缺乏对用户交互的理解,而车企则缺少智驾系统开发的经验,因此有时整个交互体验的一致性不够好,信息也不够完整。
地平线的这套 SR 希望帮助车企树立起一套高阶智驾交互的「标杆」。
实际上,内部还有一项目标是将这套 SR,做到 3A 级游戏的标准。
二、世界模型 + 数据驱动的交互博弈
作为地平线最新一代的智驾方案,SuperDrive 用上了时下最流行的大模型驱动的技术栈,也就是炙手可热的「端到端」技术。
并且,J6 这代的 BPU 也对运行大参数模型做了底层优化。

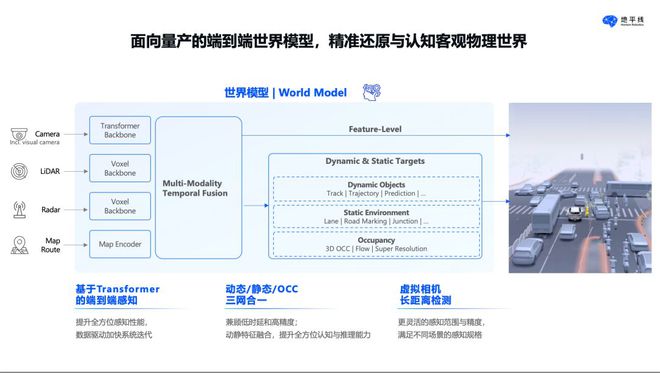
它的前端以异构传感器与导航地图的信息作为输入,进入到一个「静态环境 + 动态目标 + 占用格栅」三网合一的感知世界模型。
世界模型向下游同时输出动静态的目标信息,这些目标信息同时用于 SR 的显示,并且世界模型同步向下游传输更丰富的无损高纬度特征信息。
而下游的决策规划,则包含了模型驱动和规则兜底的两套系统。
整套系统追求拟人化的驾驶体验,希望做到「优雅不怂」。
模型驱动的决策规划,是系统能做到「优雅不怂」的其中一个原因。
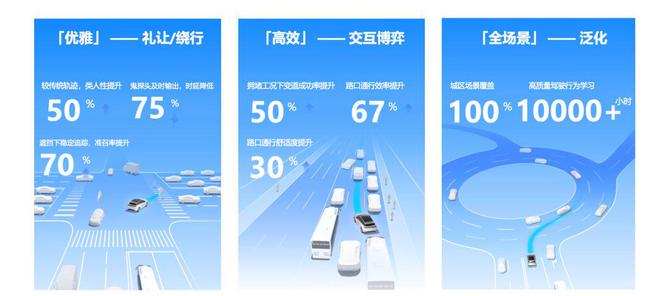
在开发的初期,地平线采集了一些国宾司机标准的驾驶数据来启动模型的训练;目前这套系统,已经学习了超过 1 万小时的高质量驾驶数据。
不过,余凯认为,端到端并不是智驾系统的终局解决方案,智驾产品也不存在一招鲜。
「真正的门槛来自千锤百炼的工程能力,在干脏活累活攒下的积累。」
比如地平线 600 万套征程家族的出货积累下的车辆纵向控制算法,「地平线拥有业界最丰富的纵向控制的数据库」。
在这批 SuperDrive 的试验车上,由于没有原厂开放的底盘控制信号,地平线是通过工程方法独立做的底盘控制。
在体验完 SuperDrive 后,这套系统在控制上的细腻程度让不少主机厂客户折服,评价地平线的团队是「懂车、懂底盘的」。
三、产品、技术、工程化,高阶智驾的铁人三项赛
在相当长一段时间内,智能驾驶都是作为先进技术被行业所研发推进。
而智驾的关键构成,比如计算机视觉、深度学习,都来自于学界的前沿研究。大家长期视最新的算法突破为瑰宝,而忽略了工程化的重要性。
工程化短板是后来很多年智驾科技公司在尝试商业落地时遇到的挑战,至今仍然如此。
至于产品化,则是非常稀缺的经验。
如果从高速 NOA 量产开始计算,智能驾驶真正开始被产品化并开始被用户大量使用,只有四五年时间。
而到了 2024 年,当智能驾驶的装配率开始快速上升,而智驾供应的格局开始急剧收敛时,高阶智驾的已经是「技术 + 工程 + 产品」全面的铁人三项赛事。
这也是余凯所说的,智能驾驶不可能做到一招鲜。
SuperDrive 是以深度定制优化的硬件为基础,高度软硬协同的方案。
征程 6 系列最高阶的计算平台 J6P,单片算力达到 560 Tops;在地平线前 3 代计算平台的设计经验基础上,J6P 集成了 BPU、CPU、GPU、MCU、ISP 和 Codec 等丰富的异构计算资源。
并且第三代 BPU 架构 Nash,专门针对大参数模型进行优化,运行 Transformer 类算法相比于主流的竞品平台有 9 - 11 倍的 FPS 性能(每秒处理的图片帧数)提升。
在城区 NOA 加速普及的阶段,头部厂商都已经深刻意识到深度软硬结合的必要性。
比如英伟达在 DRIVE 计算平台的基础上,由吴新宙带领正在开发全栈的高阶智驾软件;而 Momenta 则是从软件算法的背景出发,正在快速推进自研芯片,核心目标也是针对大模型的底层硬件优化。
深度优化的计算硬件,600 万套出货的工程积累和产品化思考,使 SuperDrive 一出场就站在了一个高起点上。
这一批的 SuperDrive 体验,地平线专门选择了在北京、上海闹市区,在高峰时段甚至夹杂着恶劣天气下,系统依然可以顺滑地完成路线的体验。
地平线希望这样的场景设置,能够尽可能地打磨出系统的上限,同时也在开展大规模的泛化测试。
预计最快到明年第三季度,我们将看到搭载 SuperDrive 的量产车上市。
2024 年,中国市场 L2 辅助驾驶的新车装配率已经超过了 50%,但大部分仍以基础辅助驾驶为主。
根据灼识咨询的预测,到 2030 年,中国智能汽车的销量将增加到 815 万台,而高阶智驾将成为主流的前装解决方案,其渗透占比预计将超过 60%。
而 SuperDrive 就是要加速这样的目标普及,余凯预计在 3 - 5 年内,十几万级的车型搭载 SuperDrive 这样的系统,完全是可以预期的。






