新智元报道
编辑:编辑部 HNX
波士顿动力的 Atlas 机器人又双叒叕来了!从最初的液压「电缆尾巴」到现在全电动 AI 增强版,这个机器人不仅会翻跟头、跳街舞,还学会了倒立侧翻,甚至开始「进厂打工」搬零件。动作捕捉技术与强化学习的加持,让 Atlas 的动作越来越像人类,而它的目标也从炫技转向实用。
最近,国内各种人形机器人轮番上阵,效果一个比一个炸裂。
作为人形机器人的老牌玩家,波士顿动力终于还是出手了!
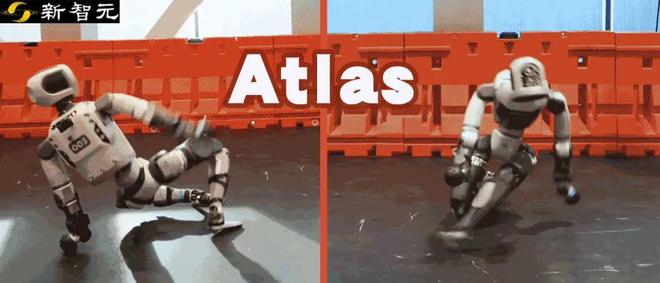
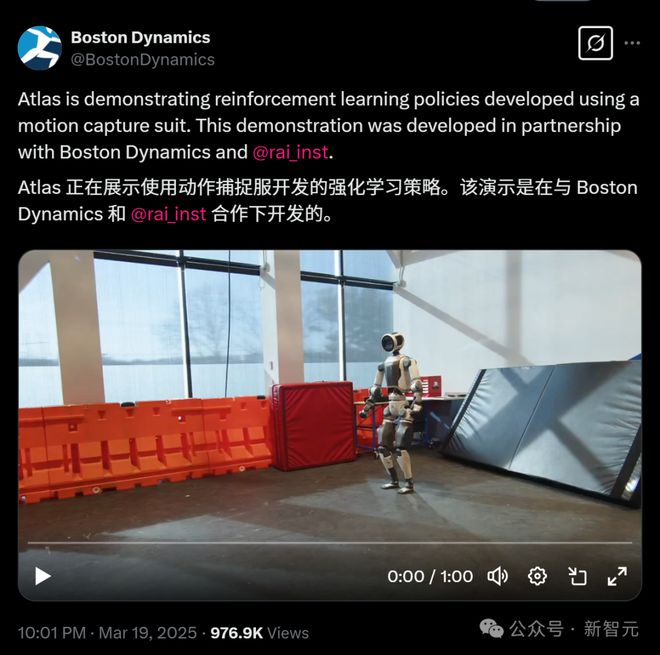
就在昨天,他们放出了一段长达一分钟的演示,只见 Atlas 不仅能跑、能爬,而且还能翻跟头、跳街舞。
这次,他们用上了利用动作捕捉技术开发的强化学习策略。从视频效果上看,确实「像个人」。
翻跟头跳街舞不在话下
Atlas 机器人走路越来越像人了!
不怪他们特别强调其使用了强化学习策略。
看起来没少学习人的走路姿势。

不只是走起来更像人了,Atlas 跑起来也更象人类了。
起步前倾开始发力,快到终点时还有减速的动作。

不仅走、跑更像人了,现在连爬都学会了。

除了上述基本的走、跑、爬之外,Atlas 还学了一些花活儿。
比如,像下面这样翻个跟头。
只不过这次蹲下去的时候没怎么站稳,差点摔倒了。

不仅能向上面那样翻跟头,还能转过身来翻。
他好像翻跟头之前还调整了一下!

接下来的动作难度就更大了。
Atlas 机器人还学会了倒立翻跟头。
这个动作直接把人看傻了!在柔韧的人也无法在空中把腰转过一圈。
同时头的方向没变!

接下来是一段 Atlas 的传统技能,街舞。
看起来它的这个祖传技能还是没有丢的。

最后一段是一个看起来最高难度的动作,倒立侧翻。
视频中 Atlas 完成的也是比较轻松。

Atlas 是怎么做的
根据国地共建具身智能机器人创新中心学术委员会主任张强的分析,Atlas 展现了全尺寸(1.8 米级)机器人运动控制领域的三项突破性进展。
首先,基于新型电驱一体化关节结构的强化学习(RL)框架已实现全动作域覆盖,通过轨迹跟踪与动作模仿(mimic RL)技术成功复现人类基础运动模式。
其次,硬件平台验证了基于动画领域高阶表征(AI4Animation/Animation HOI)的机器人动作实例化路径可行性。
最后,系统性工程化能力已构建出可扩展的机器人控制范式,为后续高阶规划器与通用运动控制器(高斯/高斯球算法体系)的研发奠定基础。
当前,几乎所有前沿人形机器人研究者都能意识到全尺寸人形实现这样的强化学习动作模仿意味着什么,如果一条轨迹都可以被跟踪的如此精确和稳定,那么本质上生成模型一切的思想都可以被引入到任意动作生成领域。
当前技术边界主要体现在非结构化环境感知领域:针对动态干涉约束下的主动视觉感知系统(如自由度耦合的布局识别)、端到端在线建图(online mapping)以及基于人类行为表征的感知-动作闭环(human-VLA)等方向仍缺乏理论突破。
动画领域已通过全身控制器研究积累了部分先验知识,面向真实物理世界的具身智能系统还需建立新的感知运动协同框架。
但值得关注的是,现有技术路线已明确硬件架构与基础控制层的收敛方向,产业界将加速推进感知-规划-执行的全栈技术整合,这预示着人形机器人技术将进入非常重要的非线性发展阶段,各家机构的差距会进一步拉大。
Atlas 的发展史
Atlas 机器人是机器人技术领域的一个标志性项目,主要经历了如下几个发展阶段。
起源
Atlas 的历史可追溯到美国国防高级研究计划署(DARPA)早期的一个项目——PETMAN(保护整体测试模型)。

早期发展(2013-2015)
2013 年 7 月,Atlas 首次亮相,作为一个液压双足机器人,最初受 DARPA 资助,专注于搜索和救援任务。

它最初需要外部电源支持。早期 Atlas 的主要特点是需要一根长长的线进行供电,早期 Atlas 身上都会看到一根长长的「电缆尾巴」。
2015 年年初,为了参加六月初的 DARPA 机器人挑战赛,Atlas 完成了自己的一次进化。
重新设计后的 Atlas 得益于「大电池背包」,已经脱离了电缆的束缚。

新版技术阶段(2016)

2016 年 2 月 23 日,新版本的 Atlas 发布。
这款被称为「HD Atlas」能够执行上一代人形机器人难以完成甚至无法完成的任务。
敏捷性与动态运动能力的提升(2017-2019)
在接下来的几年里, Atlas 的敏捷性和动态运动能力持续提升。
2017 年 11 月 Atlas 能够跳上盒子,在跳跃时转动 180 度,并完成一个后空翻。

2018 年 5 月 Atlas 可以在不平坦的草地上奔跑以及跳过草地上的木头。

能力进一步提升与跑酷(2020-2024)
2020 年,Atlas 已经能够完成整个跑酷过程 。
2021 年 8 月,波士顿动力公司展示了两台 Atlas 机器人一起完成跑酷,包括跳跃、走平衡木和跳马。

液压终结,电力驱动,AI 增强(2024)
液压终结,电力驱动,AI 增强(2024)
2024 年 4 月 16 日,液压 Atlas(HD Atlas)宣布退役。

在液压 Atlas 退役的第二天,即 2024 年 4 月 17 日,波士顿动力公司隆重推出了全新的全电动 Atlas 机器人。
这一举动标志着 Atlas 发展历程中的一个重大转变,预示着人形机器人技术的新时代。
电动 Atlas 的一个关键增强功能是其人工智能和机器学习能力的集成。
展望未来,Atlas 这样的机器人拥有巨大的发展潜力。
最后,展示一个最新版电动 Atlas 的「酷炫」功能——在现代汽车工厂搬运零件的无极转身。

这次还不是他们首次放出类似的视频片段。
就在本月早些时候,波士顿动力公布了 Atlas 机器人「进厂打工」的视频。
他们表示正在让 Atlas 学会摆放零件,并认为机器人只有在真实世界里出色的完成工作才具有价值。
这好像与大家印象中那个只会跑酷、秀空翻的 Atlas 不太一样。

在波士顿动力放出的这段视频里,Atlas 一改往日无所事事的「街溜子」做派,开始在工厂里认真干起活来。
视频中它开始练习从狭窄的料架上拾取零件,增进手部的灵活性,还不断熟悉周围的环境。
尽心尽力地干活儿。

「我们与 RAI Institute 的合作汇集了世界上两家领先的机器人组织,以帮助加速 Atlas 机器人的核心能力,使其成为人们生活中宝贵的工具。」波士顿动力公司 CEO Robert Playter 表示。
差不多一年前,波士顿动力宣布了他们全新的 Atlas 机器人,称它更快、更强、更紧凑,并且更整洁。

波士顿动力有如何建造有影响力机器人的经验。其中最重要的一点就是将大目标分解为实际问题的艺术。
一个好的问题能让人屏蔽噪音,专注于真正重要的部分。
比如,针对技术问题中最困难、风险最高的部分,以及提供比现有解决方案更实际的价值。
最近,波士顿动力找到了为 Atlas 量身定制的首个任务:从在工厂做零件排序开始,他们正在将 Atlas 投入到制造领域中。

Atlas 机器人用十余年的时间完成了从液压到电动、从炫技到实用的华丽转身。
波士顿动力通过 AI 加持,不仅让 Atlas 动作更接近人类,也让它开始真正走进现实生活。
未来,这位「跑酷王」还会解锁哪些新技能?
参考资料:
https://www.theverge.com/news/632505/boston-dynamics-atlas-humanoid-robot-breakdancing
https://www.theverge.com/24132451/boston-dynamics-atlas-robot-retirement






